Китайская компания заявила о прорыве в сотрудничестве групп андроидов
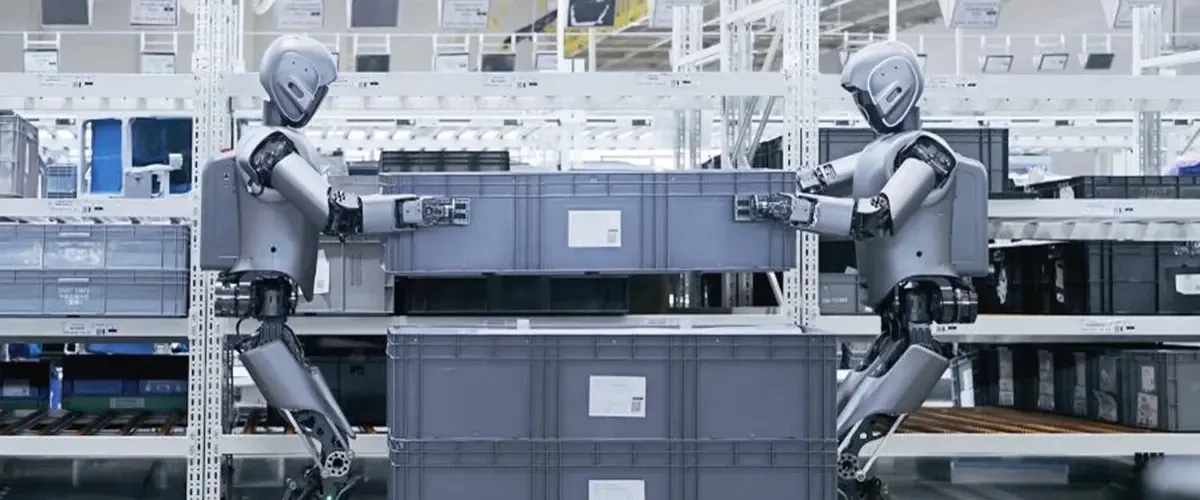
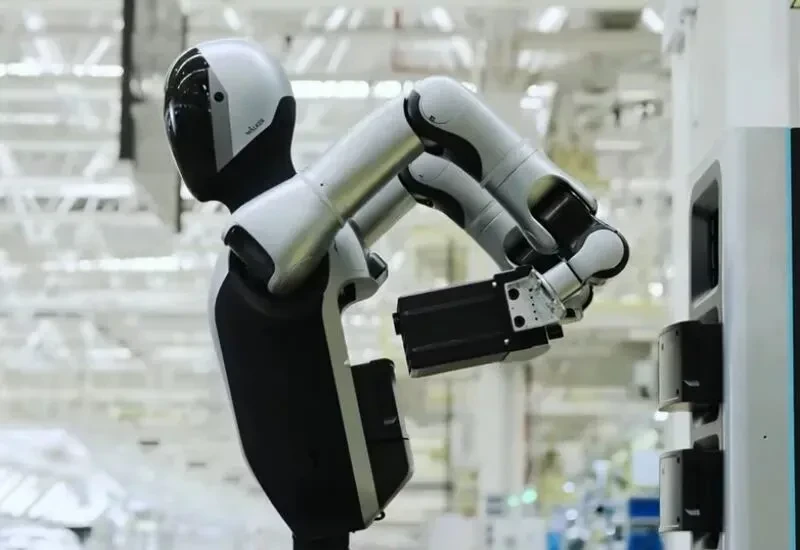
В ходе экспериментов гуманоиды Walker S1 выполняли множество задач, включая сортировку, транспортировку компонентов, точную сборку и проверку качества. Каждый робот использовал визуальные навигационные системы и тактильные датчики, что позволяло им адаптироваться к изменениям окружающей среды. Это обеспечивало синхронное движение, передачу предметов между роботами и корректировку действий при работе с хрупкими материалами.

Система управления роботов основана на технологии "Swarm Intelligence", которая обеспечивает координацию через облачные и локальные данные. Представители UBTech пояснили: "BrainNet объединяет интеллектуальные узлы для создания единой сети, формируя 'супермозг' для принятия решений и 'подмозг' для управления задачами". В производственном процессе используются гибридные алгоритмы планирования работы.
Ключевым элементом управления стала мультимодальная модель, основанная на архитектуре Transformer. Она анализирует данные, полученные с фабрики, и применяет технологию генерации с расширенным поиском (RAG) для адаптации роботов к новым операциям. В UBTech отметили, что модель обучалась на данных с Walker S, собранных на автомобильных заводах.
В 2025 году UBTech планирует выпустить от 500 до 1000 роботов Walker S. Ожидается, что их использование ускорит автоматизацию как в автомобильной, так и в электронной промышленности. Представители компании подчеркнули: "Мы переходим от индивидуальных роботов к комплексным системам коллективного разума".
Завод Zeekr стал первым местом, где было протестировано масштабное внедрение новых технологий. Инженеры наблюдали за работой машин и настраивали их алгоритмы. Разработчики уверены, что подобные системы помогут роботам функционировать не только в закрытых условиях, но и в динамичных средах.
Читайте также: